Научная группа Центра нейротехнологий и машинного обучения БФУ им. И. Канта под руководством профессора Виктора Казанцева выиграла грант РНФ. Проект направлен на разработку и создание подводного биоморфного робота – тунца, который сможет воспроизводить принципы движения, навигации и взаимодействия с живыми организмами в естественной среде, как это задумано самой природой.
Для реализации проекта задействованы ученые-биологи, математики, физики, инженеры. Здесь важно продумать каждую деталь — от способа передвижения в воде до использования технологий искусственного интеллекта, который позволит роботу принимать самостоятельные решения, ведь под водой нет системы GPS. Это первый в Российской Федерации проект по созданию подобного подводного устройства.
«На мой взгляд, за биоморфной робототехникой стоит будущее. Несомненно, задача по разработке любого аппаратно-программного комплекса является достаточно сложной, будь то самокат или самолет. В нашем же случае, эта задача уже решена эволюционно — самой природой, в том числе с точки зрения энергопотребления и функционала. Нам нужно всего лишь правильно скопировать алгоритм — создать цифровой двойник живого организма. Но, задумайтесь, насколько трудоемко создавать абсолютные копии, не зная исходного кода…. Например, простой, казалось бы, вопрос, как двигается рыба? Мы знаем, она плывет таким образом, чтобы минимизировать потерю своей энергии. Но как точно это делает в целостности своего организма — вот, что нам предстоит узнать», — рассказал ведущий научный сотрудник Центра нейротехнологий и машинного обучения Виктор Казанцев.
Создание такого робота позволит ученым расширить, с одной стороны фундаментальные знания — изучить механику передвижения живых организмов, принципов оптимизации энергопотребления, системы принятия решений и т.д. А, с другой — у проекта есть вполне конкретное практическое применение — управление биоресурсами.
«Представьте, если в океане произошла экологическая катастрофа, например, разлив нефти. В таком случае роботы способны в качестве лидера или условного хищника увести косяк рыб в безопасное место. Не так давно одна канадская компания стала активно использовать птицеподобных роботов в аэропорту, чтобы распугивать настоящих пернатых подальше от взлетной полосы. Востребованность таких устройств очевидна», — объяснил ученый.
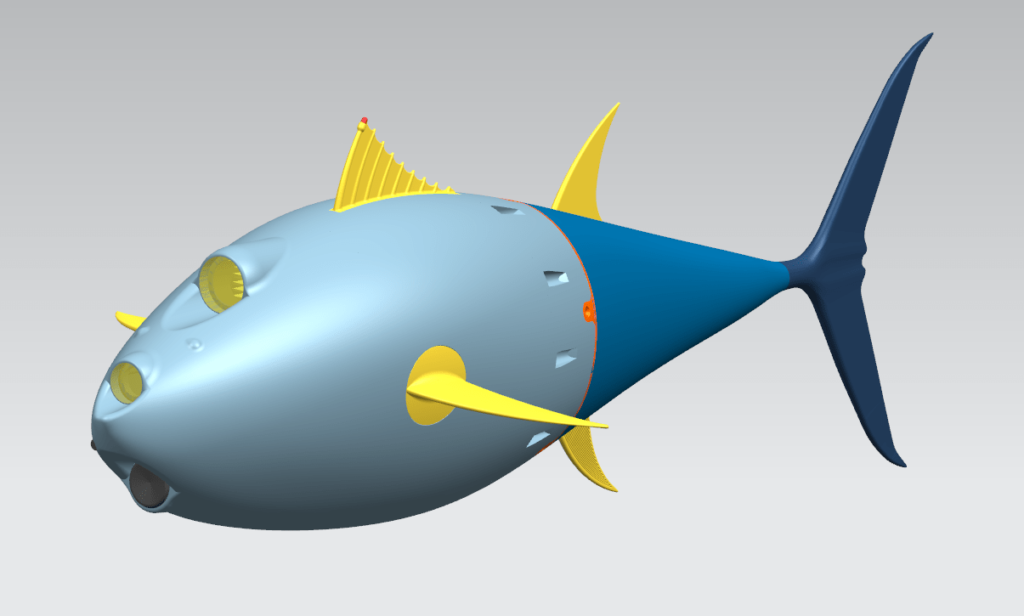
Исследователи показали ходовой макет робота-тунца, который может самостоятельно двигаться не только по прямой траектории, но и с поворотами.
«Впереди много работы по решению нетривиальных задач. Наш тунец будет «обитать» в 3D-пространстве, поэтому впереди разработка и подбор двигателя, аккумуляторов, датчиков зрения, эхолокации и т.д. Немаловажным является система искусственного интеллекта, чтобы рыба была автономным аппаратом. И вся эта «начинка» должна поместиться в корпусе, который полностью воспроизводит облик «природного собрата» для органичного единения с естественной средой обитания», — рассказал Виктор Борисович.